Deep Learning for Real-Time Neural Drive Decoding
A real-time decoding pipeline that predicts continuous finger forces from 224-channel HD-EMG to bridge raw neural signals and useful motor feedback.
Manuscript in preparation
Overview
From dense muscle signals to interpretable force estimates at real-time latency.
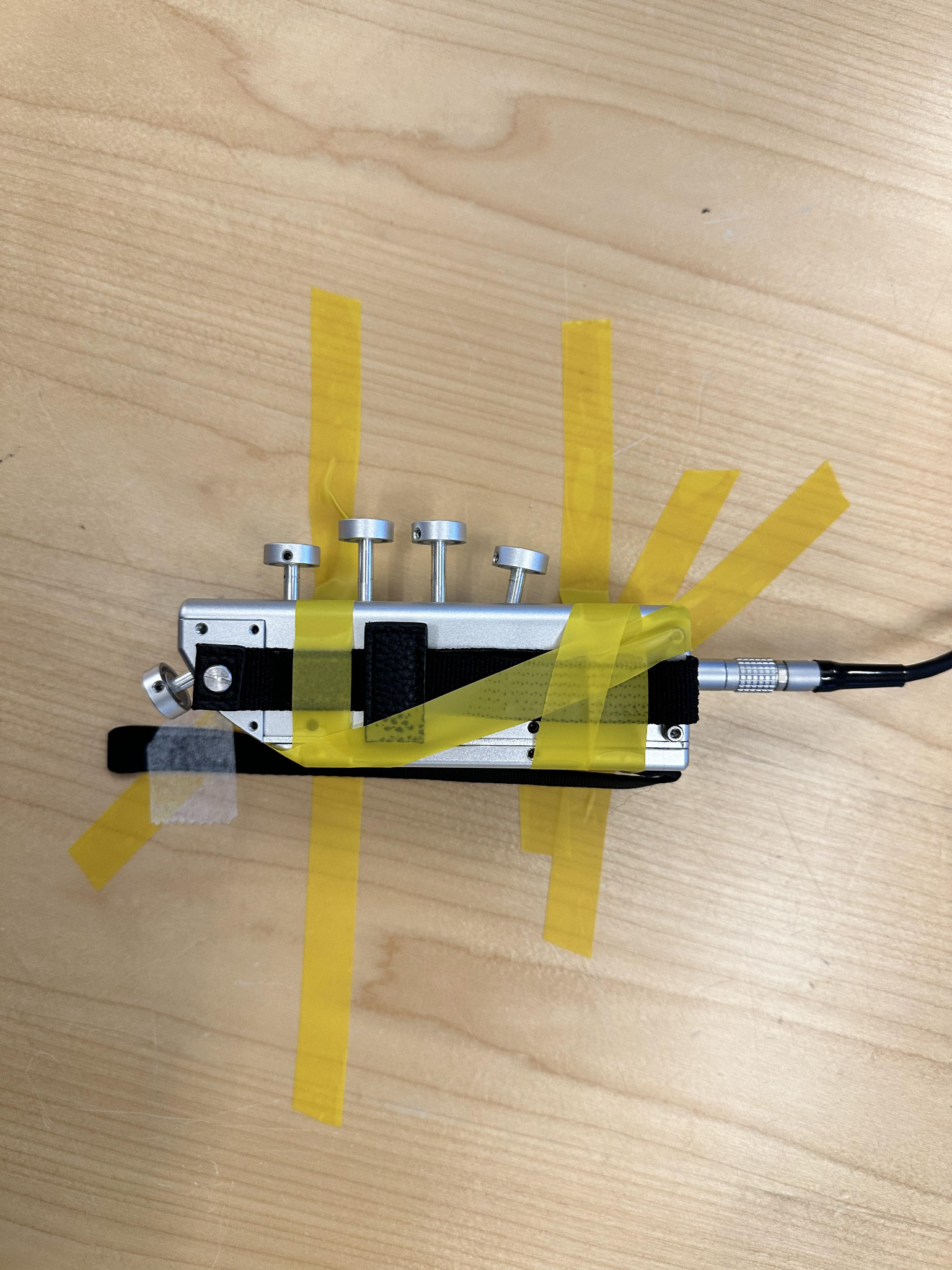
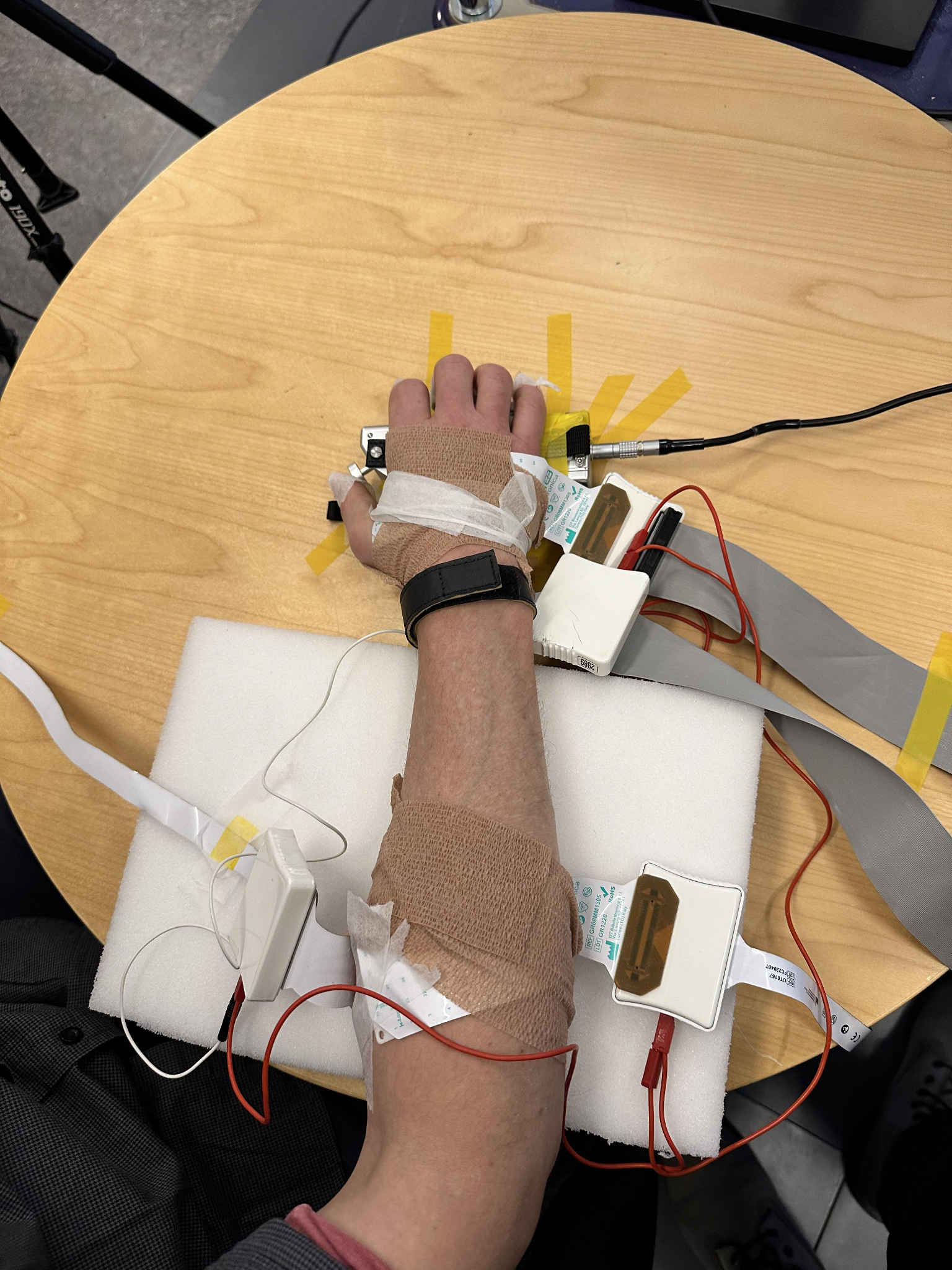
- Combines 224-channel HD-EMG with precise force measurement using the Dextrain Manipulandum.
- Targets continuous finger-force decoding with latency suitable for biofeedback.
- Frames decoding as a translational bridge from raw electrophysiology to assistive interaction.
Measurement platform
This project brings together dense muscle sensing and precise force measurement to study continuous finger-force decoding. The instrumentation is a major contribution in itself because it creates the ground truth required for mechanistic modeling.
Signal processing and modeling
The project explores how high-density EMG can be transformed into continuous estimates of finger force. That makes the signals more interpretable and more actionable for rehabilitation or control contexts.
The overall direction balances predictive accuracy with temporal responsiveness, which is why the real-time framing matters so much.
Current status
The materials in the folder position this work as an active research effort aimed at high-fidelity decoding and translational neurorehabilitation use cases.